{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Artikel
Schiedam heeft de langste
Lees meer
De invoering van ERTMS, het Europese treinbeveiligingssysteem, stond aanvankelijk gepland in 2050, maar die datum is te ver weg. Om het ontwerp- en uitvoeringsproces te versnellen, heeft ProRail enkele jaren geleden de markt uitgedaagd om met innovatieve ideeën te komen. Strukton bedacht de ERTMS-configurator en de ERTMS-Trackbot en heeft beide projectvoorstellen verder ontwikkeld.
Wouter Groen, teamleider BIM-loket en Virtuele Analyse, vertelt over de ERTMS-configurator die met talloze puntjes, een zogeheten puntenwolk, een 3D-model maakt van de bestaande situatie. “Met zo’n ‘Reality Model’ kun je nog voordat de werkzaamheden van start gaan, achter je bureau zien hoe het ontwerp in de bestaande situatie eruit zal zien. Een groot voordeel, want loop je eenmaal in het uitvoeringsproces tegen dingen aan, dan ben je te laat en heb je faalkosten.”
“Vooral bij objectherkenning hebben we de afgelopen twee jaar flinke stappen gezet. Voor objectdetectie binnen een 3D-puntenwolk is namelijk innovatieve technologie benodigd. In de spoorwereld is dit nog niet eerder toegepast. Daarom zijn wij een samenwerkingsverband aangegaan met de Saxion Hogeschool.”
Van de 3D-omgevingsscan kan de computer inmiddels de contouren van een spoorobject herkennen, maar feilloos ging dat aanvankelijk niet. Wouter: “In het begin heb je te maken met kinderziektes, bijvoorbeeld dat een paal een boom blijkt te zijn, of een sein een verkeersbord. Door de computer te trainen gaat het, dankzij AI, steeds beter. We hebben echt progressie geboekt en de resultaten zijn nu professioneel en betrouwbaar.”
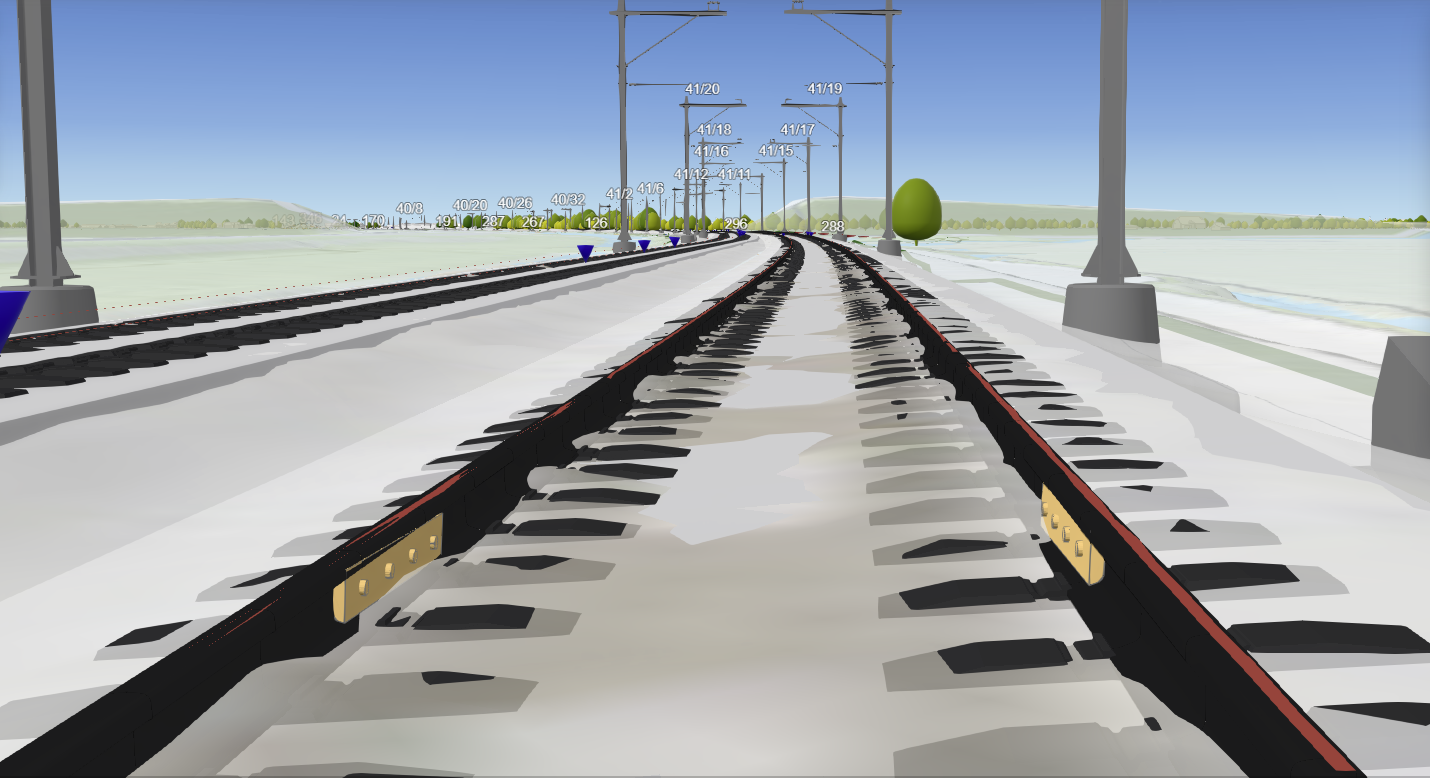
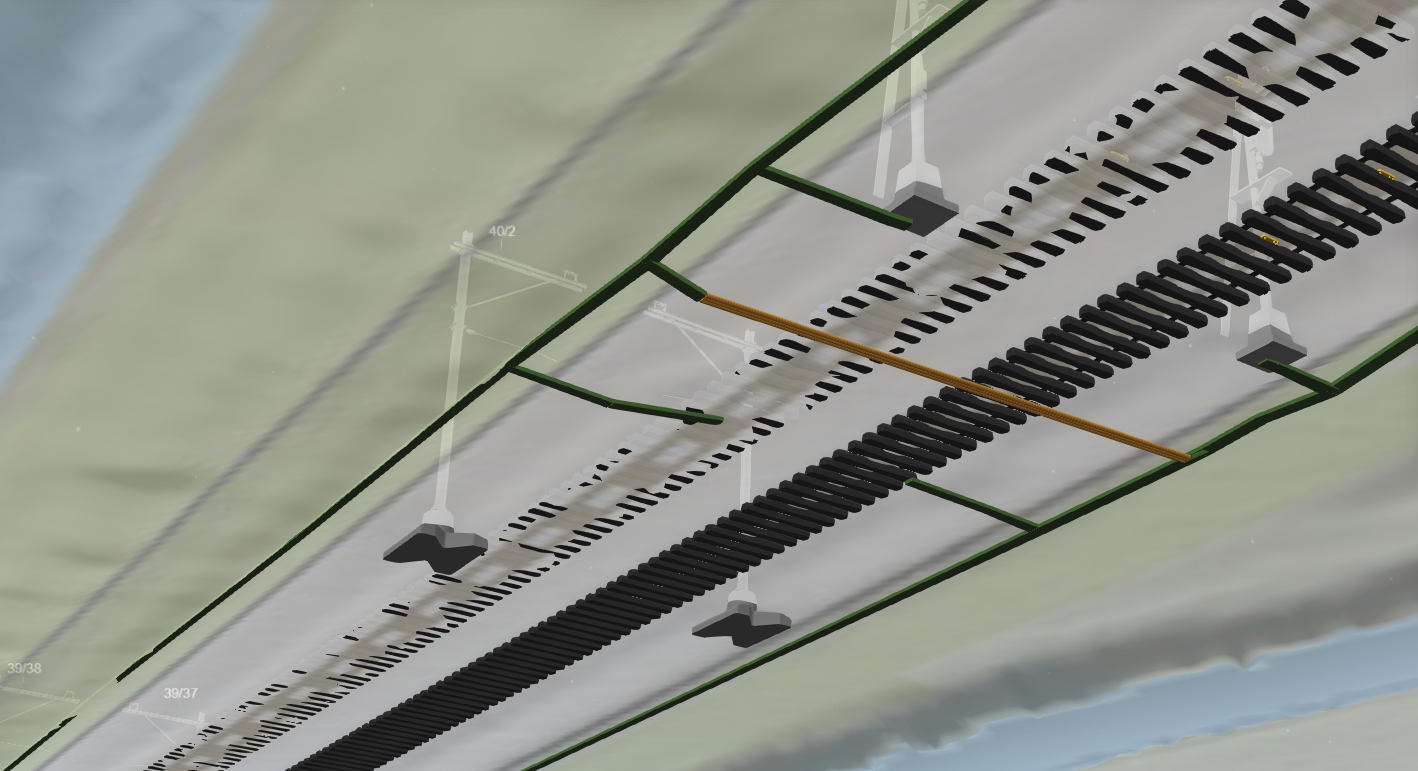
De ERTMS-configurator maakt van een puntenwolk een ‘Reality Model’ vanuit verschillende standpunten. Van onderaf (een zogeheten ‘molview’) met alle ondergrondse objecten, vanuit het spoor en van bovenaf met daarin gevisualiseerde objecten zoals seinen, bovenleidingpalen en ERTMS-balises (gele kastjes).
“Ook met de trackscan, die een puntenwolk van het spoor maakt, hebben we vorderingen gemaakt. We kunnen met zó’n hoog detailniveau objecten herkennen, zoals een spoorstaaflas of een dwarsligger. Dat helpt ons zeker in het ontwerpproces, om een volledig beeld te hebben van hetgeen er buiten ligt. We hoeven niet meer handmatig zaken met het oog te herkennen, de computer doet dat. Wij zetten het op de kaart en iedereen kan erbij.”
Wouter: “Informatie die de meettrein verzamelt, wordt ook weer gebruikt voor de ‘ERTMS-Trackbot ’, een robotwagentje dat in het spoor rijdt en geautomatiseerd seinwezenobjecten kan plaatsen zoals balises en assentellers. Een ingenieursbureau die het ontwerp maakt, weet niet exact waar een dwarsligger ligt of een las in het spoor zit. Een ontwerp kan daardoor niet in de praktijk uitvoerbaar zijn. Met gebruikmaking van data van de meettrein zijn we nu een ontwerptool aan het ontwikkelen die in een paar minuten een ontwerp kan controleren. Je kunt de doorlooptijd hier enorm mee versnellen.”

Informatie die de meettrein verzamelt gebruiken we voor de ‘ERTMS-Trackbot ’, een robotwagentje dat in het spoor rijdt en geautomatiseerd seinwezenobjecten kan plaatsen.
Ontwikkelaar Thomas Fonville gaat nader in op de ontwikkeling van de ERTMS-Trackbot. “Ongeveer anderhalf jaar geleden hebben we een fabrikant benaderd om de ERTMS-Trackbot te bouwen. Samen met de bouwer ontwerpen we de onderdelen van de robot en testen we de functionaliteiten. Verder moet de robot ook zijn eigen logica ontwikkelen om te begrijpen hoe die iets efficiënt kan doen. Hij moet zich eerst via GPS positioneren en zorgen dat het voertuig rijdt. Vervolgens moet de robot met een laserscanner kunnen detecteren wat die aan infrastructuur herkent. Wanneer die eenmaal een dwarsligger weet te herkennen, dan kun je weer een vervolgstap maken om hem verschillende types te leren onderscheiden.
Het ontwikkelen van die intelligentie kost wel veel tijd”, aldus Thomas, maar hij is tevreden over het proces. “Stapsgewijs doet de robot steeds meer wat wij van hem verwachten. Uiteindelijk zal hij in het voertuig verschillende handelingen moeten kunnen uitvoeren. Dan worden volgens een bepaalde cyclus diverse gereedschappen vastgeklikt aan de robotarm. Ook zitten daarin meetsensoren, bijvoorbeeld om te registreren met hoeveel kracht hij de bevestigingen aandraait.”
Niet onbelangrijk tenslotte is de administratieve kant. Thomas: “We zijn met ProRail in gesprek om zo efficiënt mogelijk de administratie rondom het installeren af te handelen. Wellicht wordt in de toekomst een digitale koppeling met de systemen van ProRail mogelijk. Dan hoeven we niet meer handmatig een PDF met gegevens naar elkaar te mailen, maar kan de data die de robot heeft vastgelegd direct naar de opdrachtgever.”
Zo ver is het nog niet. Wouter en Thomas zien eerst uit naar juni wanneer de ERTMS-Trackbot een aantal werkzaamheden zal uitvoeren. “Op dit testtraject willen we de robot assentellers laten monteren. Ook is het de bedoeling dat we de configurator op orde hebben, zodat we die tegelijkertijd kunnen gebruiken. Als het allemaal lukt gaan we kijken of we deze nieuwe techniek breder kunnen inzetten.
De meettrein van Strukton rijdt het hele land door en verzamelt data voor ERTMS. Op de meettrein zit onder meer de volgende apparatuur:
Ben van Schijndel
Businessline Manager Signalling & Power